ストローとひもを組み合わせて、人間の手と同じような関節と腱の仕組みを作ります。レバーを動かすと指が曲がるコントローラーも作ります。このコントローラーをサーボモーターにつなぎ、マイクロビットで動かして、声に反応してジャンケンができるようにします。
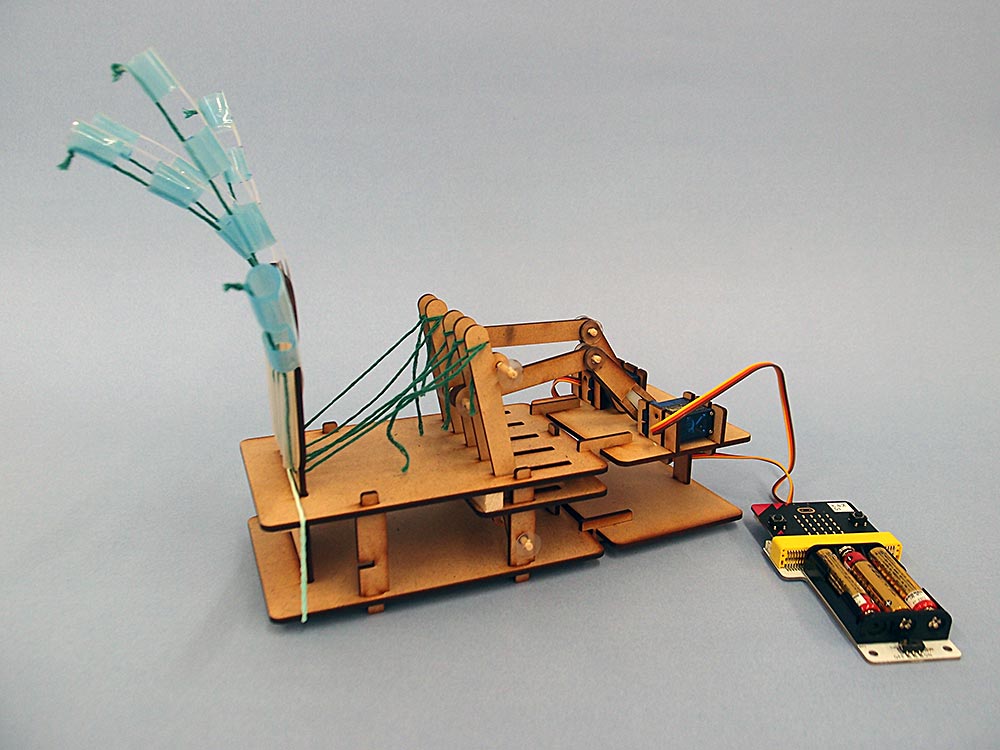
※持ち帰れるのはロボットハンド+コントローラーで、マイクロビットとサーボモーターは持ち帰れません。
お申込みはこちらから



開館時間
10:00~17:00(有料観覧受付16:30まで)
GW・夏休み・SWは9:30~17:00
休館日 月曜日(祝日の場合は翌日)、年末年始
![]()


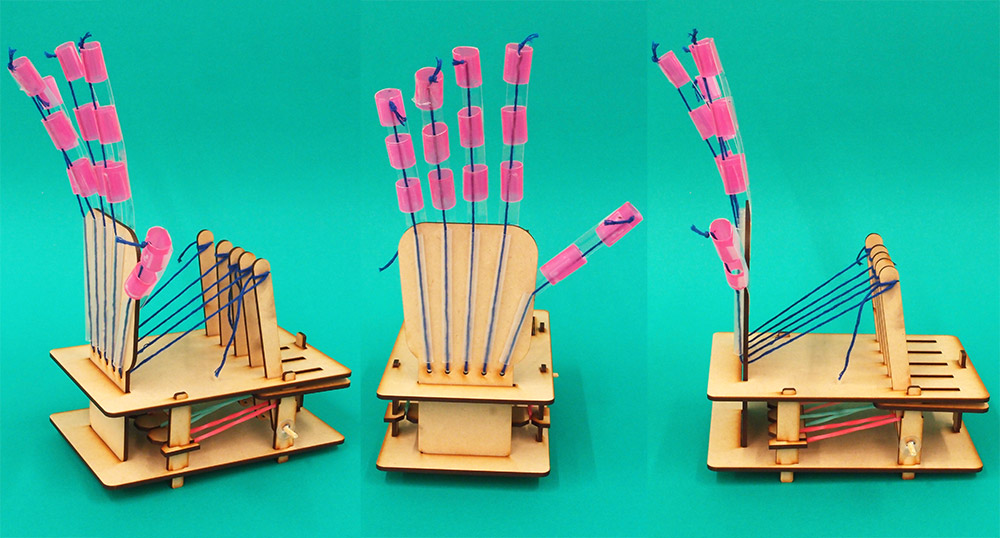
ストローとひもを組み合わせて、人間の手と同じような関節と腱の仕組みを作ります。レバーを動かすと指が曲がるコントローラーも作ります。このコントローラーをサーボモーターにつなぎ、マイクロビットで動かして、声に反応してジャンケンができるようにします。
※持ち帰れるのはロボットハンド+コントローラーで、マイクロビットとサーボモーターは持ち帰れません。
お申込みはこちらから

